

高级驾驶辅助系统(Advanced Driver Assistant System,ADAS)是自动驾驶的前期重要阶段,现在已经在国内市场得到快速推广和应用。我公司凭借在汽车领域的工程经验积累,推出了完整的ADAS HIL测试系统解决方案,为ADAS控制器的开发提供测试服务,从而在控制器开发的前期阶段就完成ADAS控制器的功能测试和故障诊断功能验证,从而节约实车测试成本和测试风险。
常见ADAS系统包括控制器本体和外部传感器,摄像头(Camera)、雷达(Radar)、激光雷达(LIDAR)、导航模组等。这些传感器感知外部物理信号,经过处理后通过总线接口技术将数据传输给ADAS控制器。
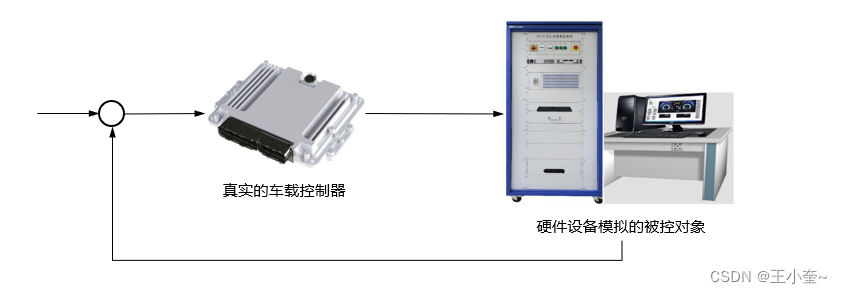
系统组成
为了实现对ADAS系统的测试,需要虚拟整个道路场景,并且将道路场景进行处理,经过模拟器转换成传感器可以接收的物理信号。ADAS控制器接收传感器的感知信号,经过传感器融合和决策,将控制指令发送给实时仿真机的虚拟整车模型,整车模型刷新车身运行状态,更新在工况场景中的车辆信息。
整个系统包括上位机、实时仿真机、摄像头目标模拟器(暗箱和投影屏)、毫米波雷达模拟器(车载雷达测试系统,VRTS)、超声波雷达模拟器、激光雷达模拟。
将雷达目标模拟器和3D虚拟道路场景模拟器、位置信号仿真模拟器集成到HIL系统中,生成基于场景的测试程序,该测试程序可完全同步摄像机、雷达数据、导航模组,以验证传感器融合算法。
图形引擎可以导入第三方车辆动力学模型,接收转向、加速和制动信息,改变车辆的运动状态。
图形引擎从置于车辆挡风玻璃上的摄像头和视角再现场景。而且场景可以根据距离地面的高度和摄像头的视场进行修改。另外,该引擎还可以在指定速度下,动态刷新摄像头与设定障碍物的距离变化。
根据所选的障碍物信息,图形引擎输出车辆速度和VRTS生成射频信号所需的信息,发送给VRTS,产生雷达能够接收的射频信号。
根据规划的路径,产生模拟的位置信号,使导航模组定位,发给仿真机,仿真机进而将下一时刻的位置信息下发给位置信号模拟器,产生位置信号。
主要功能
1、为ADAS控制器提供虚拟测试环境,测试ADAS控制器功能。
2、 多种传感器物理信息注入,便于对传感器及其融合算法进行测试。
3、 建立多种虚拟场景,模拟多种路况,可以重复测试。
4、 支持拓展其他测试:导入高精度地图,设置复杂交通流,进行软件测试;
5、 控制器控制主板硬件测试、软件测试、通信测试。
6、 支持多种通信接口,包括CAN、LIN、以太网等,多个通道相互独立,单通道可以模拟多个节点。
7、 支持车辆控制器多种信号通道接口,包括且不限于AO、AI、DO、DI、PWM In、PWM Out、电阻、功率驱动。
8、 支持硬件电气故障模拟(信号开路、引脚间短路、对电源短路、通道阻抗变化、干扰信号注入等),故障注入电流分为多个级别。
9、 可以在线修改模型参数,导出模型运行数据。
10、 可以重复测试、自动测试。
11、 支持用户进行仿真模型的二次开发及参数配置,实现其他类似控制器的HIL测试。
使用环境
HIL测试系统适用于室内试验室环境。
试验温度:-10℃~50℃,避免局部过热
试验湿度:10%~90%R.H.(90% R.H.时温度为35℃),无结露
大气压力:80~120kPa(环境温度为25℃)
海拔高度:4000m以下
供电电源:AC220V±10%,50±2 Hz
上一篇:暂无
下一篇:暂无